

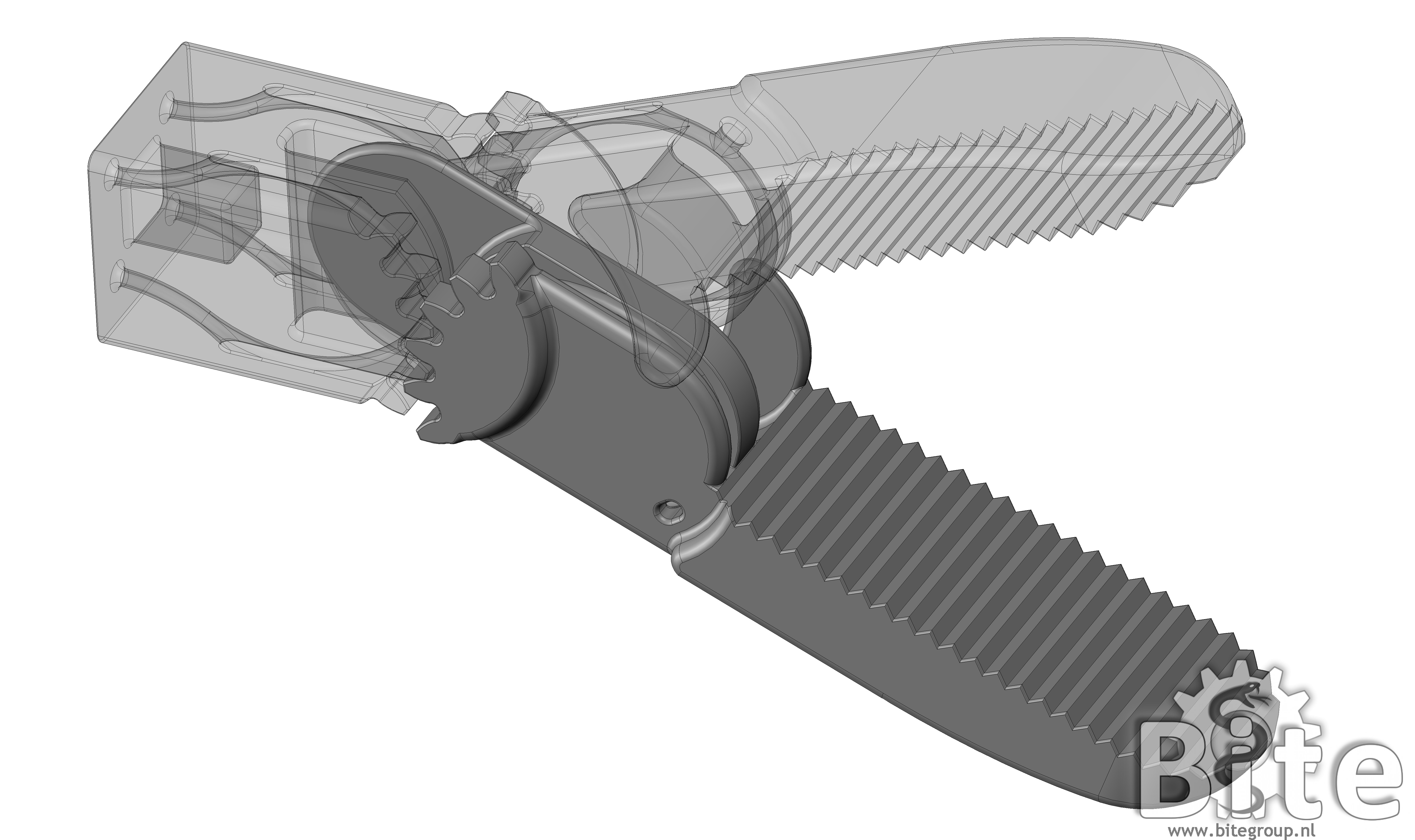
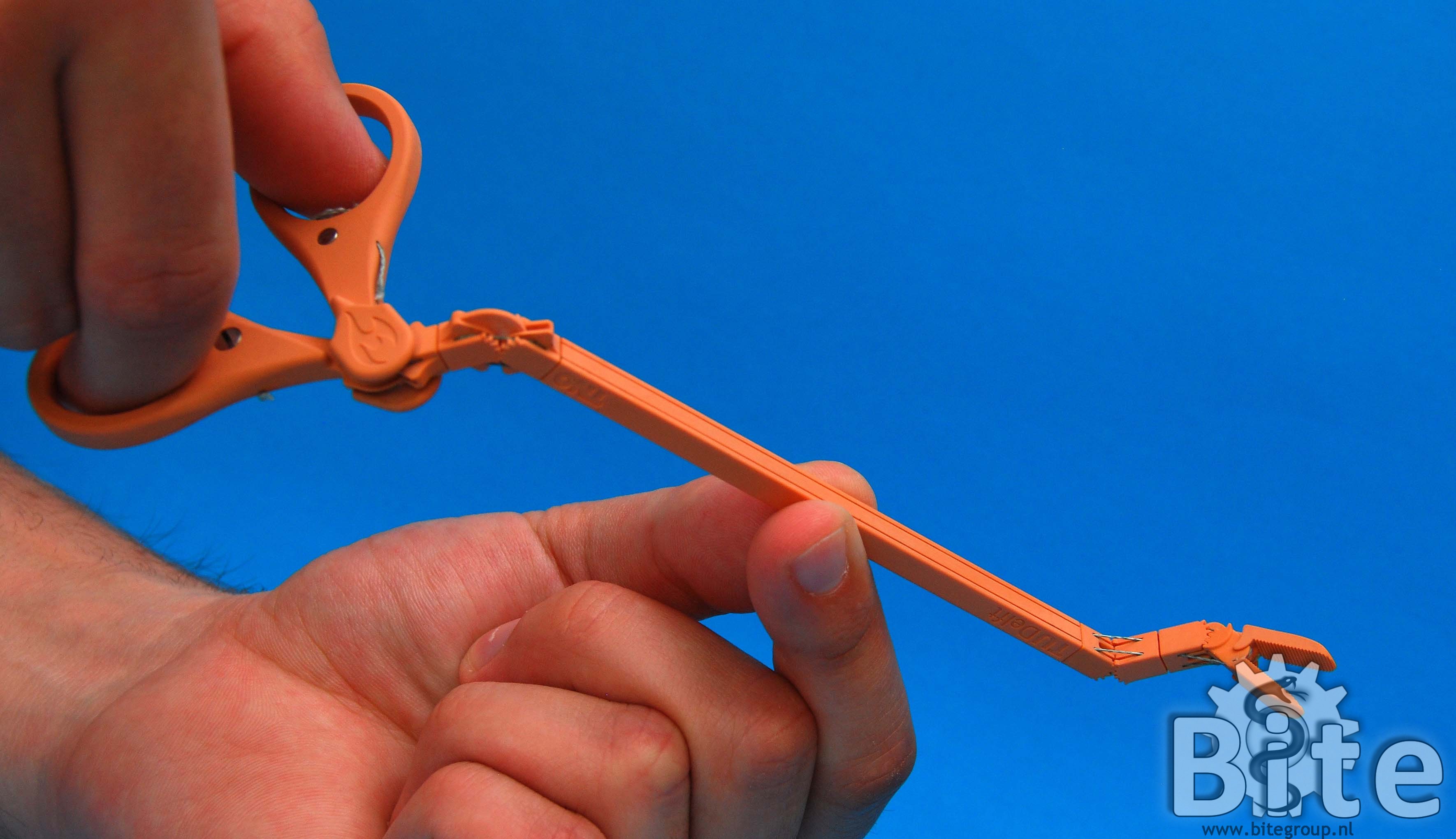
Developed in 2012-2015, thickness 5 mm, steering range: ±90º in all directions, complex components made by 3D-printing.
The DragonFlex has been developed in close-collaboration with Dr. Filip Jelinek, former PhD from the BITE-Group and currently employed at ACMIT.
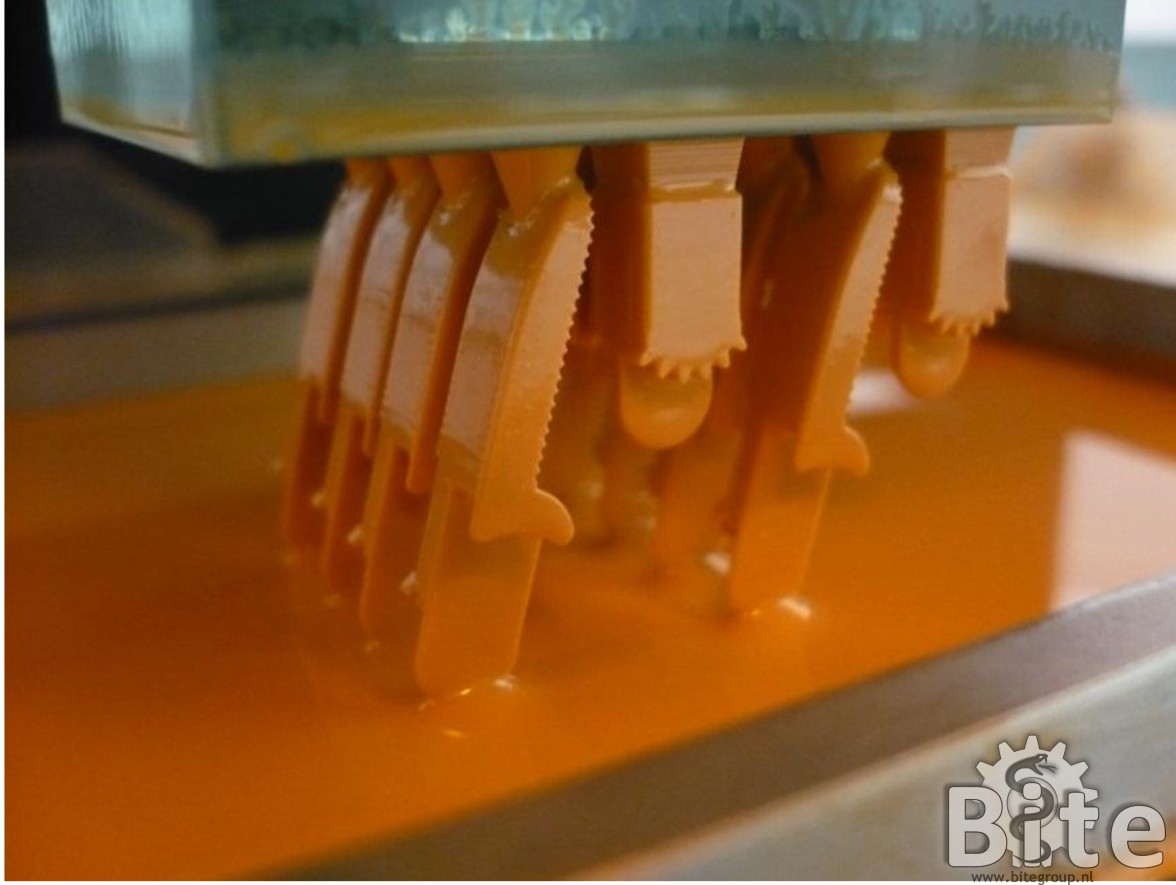
In follow-up of the successful DragonFlex Macro, the DragonFlex Micro has been miniaturized to a 5 mm scale, where special attention has been given to the reliability and precision of the mechanism and optimization of the 3D-printing technique for such small scale components. Developing and optimising new design methodologies for 3D-printing, a number of prototypes have been manufactured from different materials, resulting in world’s first steerable surgical instrument made entirely by 3D printing.

Publications
- Jelinek F., Breedveld P. (2015). Design for additive manufacture of fine medical instrumentation: DragonFlex case study. ASME Journal of Mechanical Design, Vol. 137, No. 11, pp. 111416-1–7.
- Jelinek F., Arkenbout E.A., Henselmans P.W.J., Pessers R., Breedveld P. (2015). Classification of Joints Used in Steerable Instruments for Minimally Invasive Surgery. ASME Journal of Medical Devices, Vol. 9, March 2015, pp. 010801-1-010801-11.
- Jelinek F., Diepens T., Dobbenga S., Jagt G. van der, Kreeft D., Smid A., Pessers R., Breedveld P. (2014). Method for minimizing rolling joint play in the steerable laparoscopic instrument prototype DragonFlex. Minimally Invasive Therapy, 2014, Early Online, 1-8.
- Jelinek F., Gerboni G., Henselmans P.W.J., Pessers R., Breedveld P. (2014). Attaining high bending stiffness by full articulation in steerable minimally invasive surgical instruments. Minimally Invasive Therapy, 2014, Early Online, 1-9.
- Jelinek F., Pessers R., Breedveld P. (2014). DragonFlex Smart Steerable Laparoscopic Instrument. ASME Journal of Medical Devices, Vol. 8, March 2014, pp. 015001-1-015001-9.
- Jelinek F., Arkenbout E.A., Henselmans P.W.J., Pessers R., Breedveld P. (2014). Classification of Joints Used in Steerable Instruments for Minimally Invasive Surgery. ASME Journal of Medical Devices, Vol. 8, Sept. 2014, pp. 030914-1-030914-2
- Jelinek F., Breedveld P. (2013). DragonFlex – Smart steerable laparoscopic instrument. ASME Journal of Medical Devices, Vol. 7, June 2013, pp. 020911-1-020911-2 (also published in Proc. 2013 ASME Design of Medical Devices Conference, April 8-11, Minneapolis, MN, USA).
- Jelinek F., Dobbenga S., Jagt G. van de, Kreeft D., Smid A., Pessers R., Breedveld P. (2013). The method for minimizing the rolling joint play in the steerable laparoscopic instrument prototype – DragonFlex. Proc. ASME Design of Medical Devices Conference – Europe Edition 2013, Oct. 7-9, Aula Conference Centre, TU Delft, Delft, the Netherlands, 1 p.
- Jelinek F., Dobbenga S., Jagt G. van de, Kreeft D., Smid A., Pessers R., Breedveld P. (2013). The method for minimizing the rolling joint play in the steerable laparoscopic instrument prototype – DragonFlex. Proc. 25th International Conference of Society for Medical innovation and Technology (SMIT), Sept. 5-7, Baden-Baden, Germany, 1 p.
- Jelinek F., Pessers R., Breedveld P. (2013). DragonFlex – smart and simple steerable laparoscopic instrument. Abstr. 4rd Dutch Bio-Medical Engineering Conference, Jan. 24-25, Egmond aan Zee, the Netherlands, 1 p.