

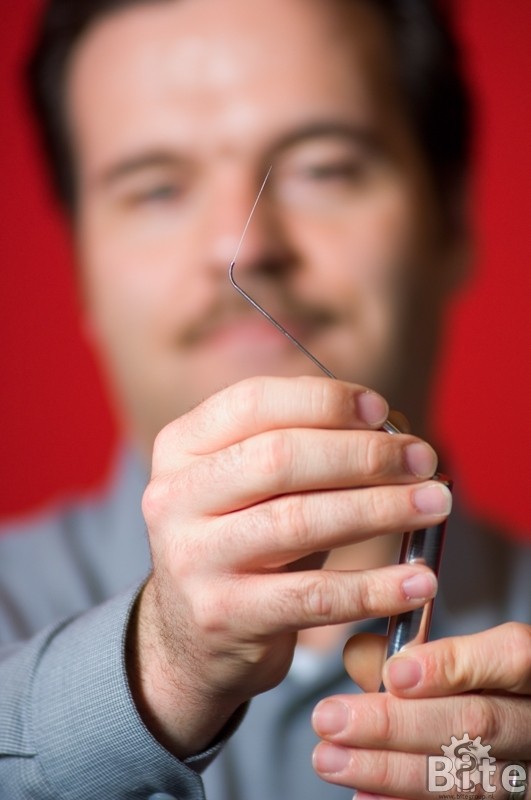
Developed in 2005-2006, diameter 1.3 mm, steering range: ±90º in all directions.
The MicroFlex is a steerable instrument for micro-surgery with a miniature Cable-Ring mechanism consisting of a ring of six steel cables (Ø0.2 mm) surrounded by a spring. The six cables are used for steering the tip, whereas the inner spring is replaced by a central cable that can be used to drive a miniature gripper on the tip (not yet incorporated in this prototype). The result is an instrument that realizes 3D-steering with only seven cables and a spring – smaller and at the same time simpler than existing steerable instruments.



Publications
- Jelinek F., Arkenbout E.A., Henselmans P.W.J., Pessers R., Breedveld P. (2014). Classification of Joints Used in Steerable Instruments for Minimally Invasive Surgery. ASME Journal of Medical Devices, Vol. 8, Sept. 2014, pp. 030914-1-030914-2
- Breedveld P. (2014). Bio-Inspired medical technology. International Conference NanotechITALY2014, Nov. 26-28, Venice, Italy, 2 p.
- Fan C., Dodou D., Breedveld P. (2013). Review of manual control methods for handheld maneuverable instruments. Minimally Invasive Therapy, Vol. 22, pp. 125-135.
- Breedveld P., Scheltes J.S., Blom E.M., Verheij J.E.I. (2005) A new, easily miniaturized steerable endoscope – squid tentacles provide inspiration for the Endo-Periscope. IEEE Engineering in Medicine & Biology Magazine, November/December 2005, pp. 40-47.
Media