Commercializing our squid-based steering technology, spin-off DEAM received an investment from the investment firm Carduso Capital in Groningen, the Netherlands. This will make it possible for DEAM to start-up the production phase, focusing on a market introduction second half of 2018.
In the TV-program “Het Ei van Midas”, renowned Dutch biologist Midas Dekkers explores how ideas from Nature can inspire new technology. In this episode, he visited the BITE-group to learn more about our tentacle-like maneuverable instruments.
Renowned Dutch biologist Midas Dekkers talks on TV at discussion program Pauw about his new TV-program “Het EI van Midas” that discusses nature-inspired technology, using our octopus-inspired steerable instruments as an example.
The Dutch TV-program “De Kennis van Nu” (“The Knowledge of Now”) has made a documentary about the research in the BITE-group, explaining how we use the anatomic architecture of cuttlefish tentacles as a source of inspiration for our research on maneuverable surgical devices.
Wasp ovipositors are thin and flexible needle-like structures used for laying eggs inside wood or larvae. Wasp ovipositors are composed out of longitudinal segments, called “valves”, that can be actuated individually and independently of each other with musculature located in the abdomen of the insect. In this way the wasp can steer the ovipositor along curved trajectories inside different substrates without a need for rotatory motion or axial push.
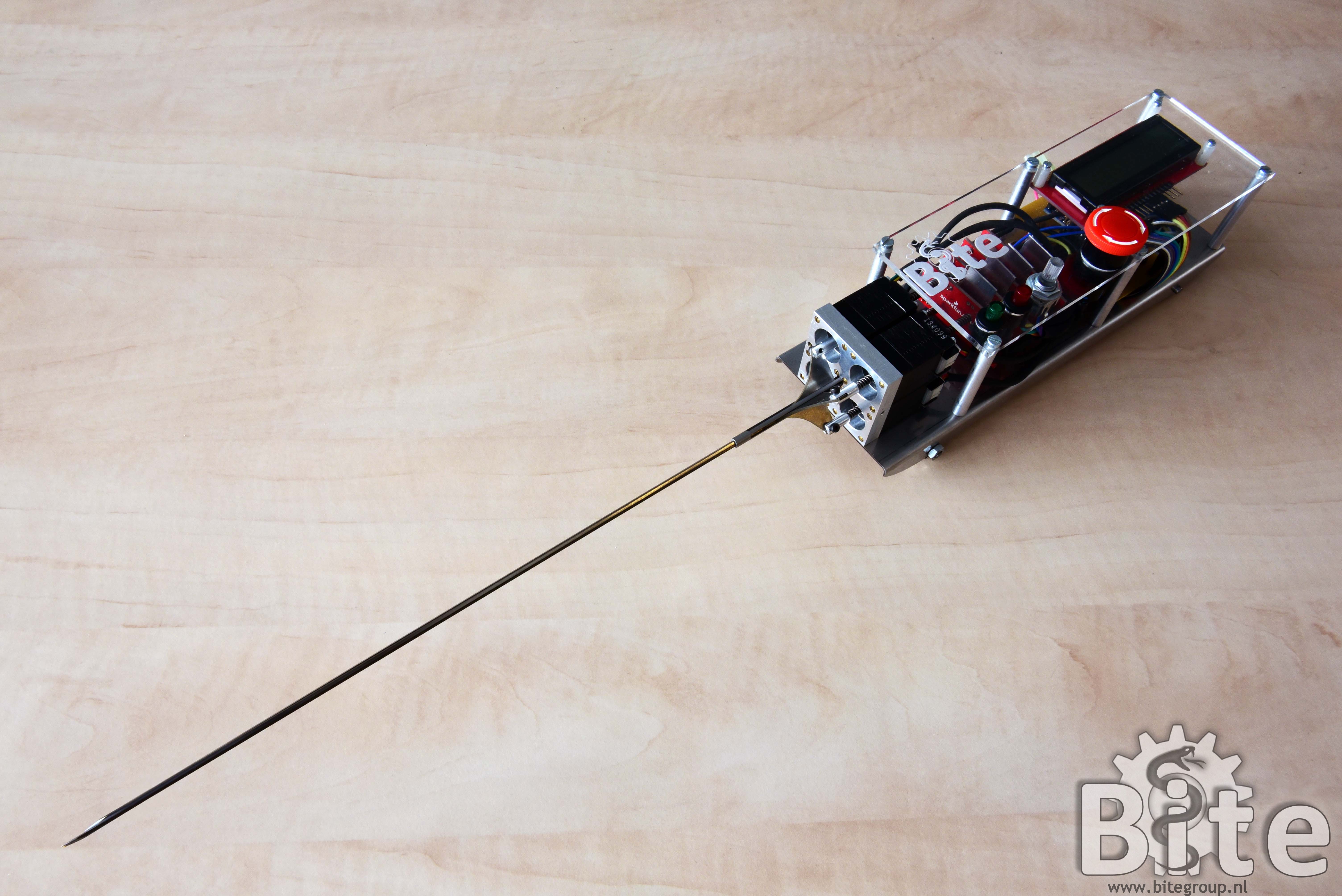
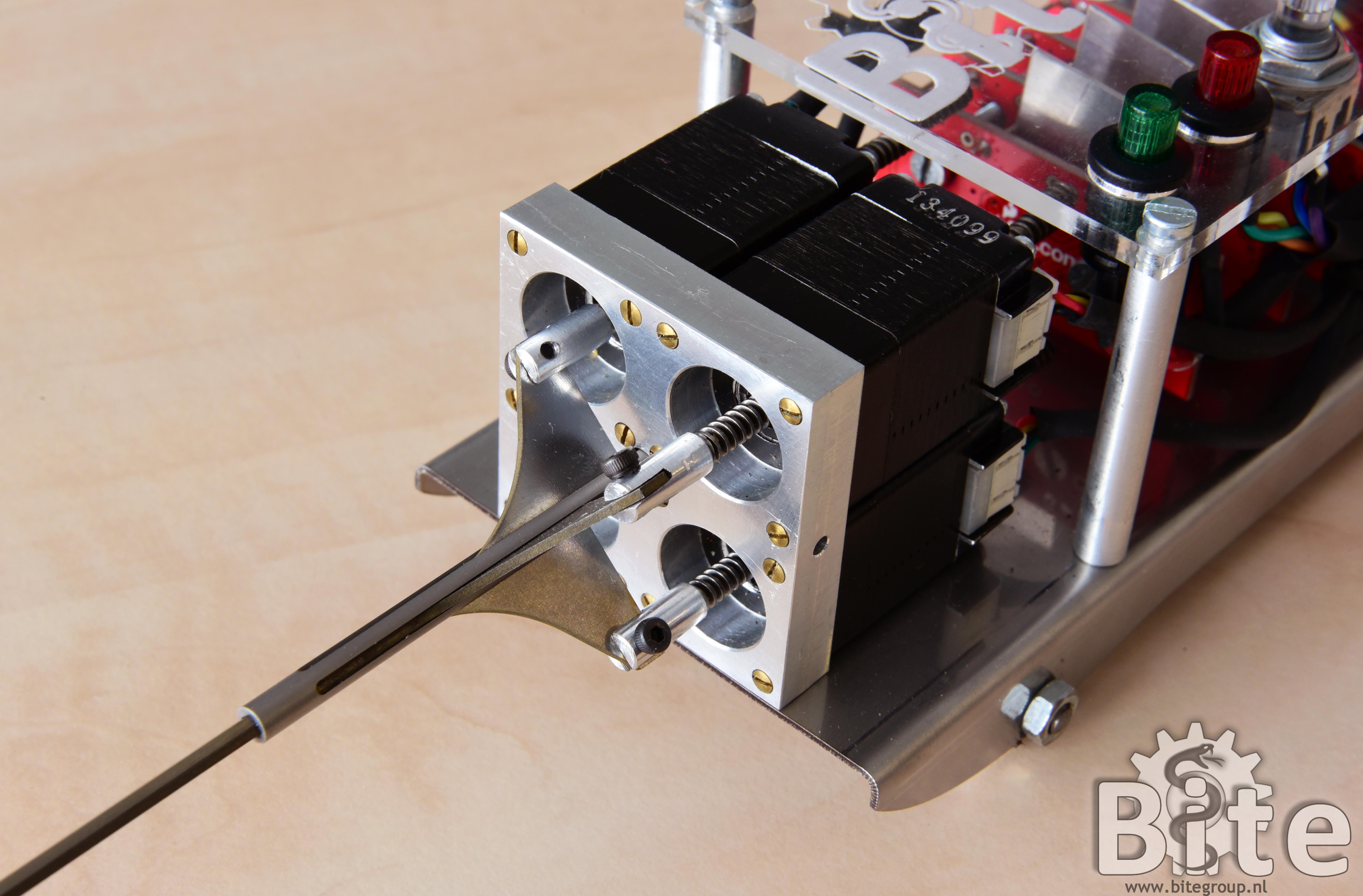
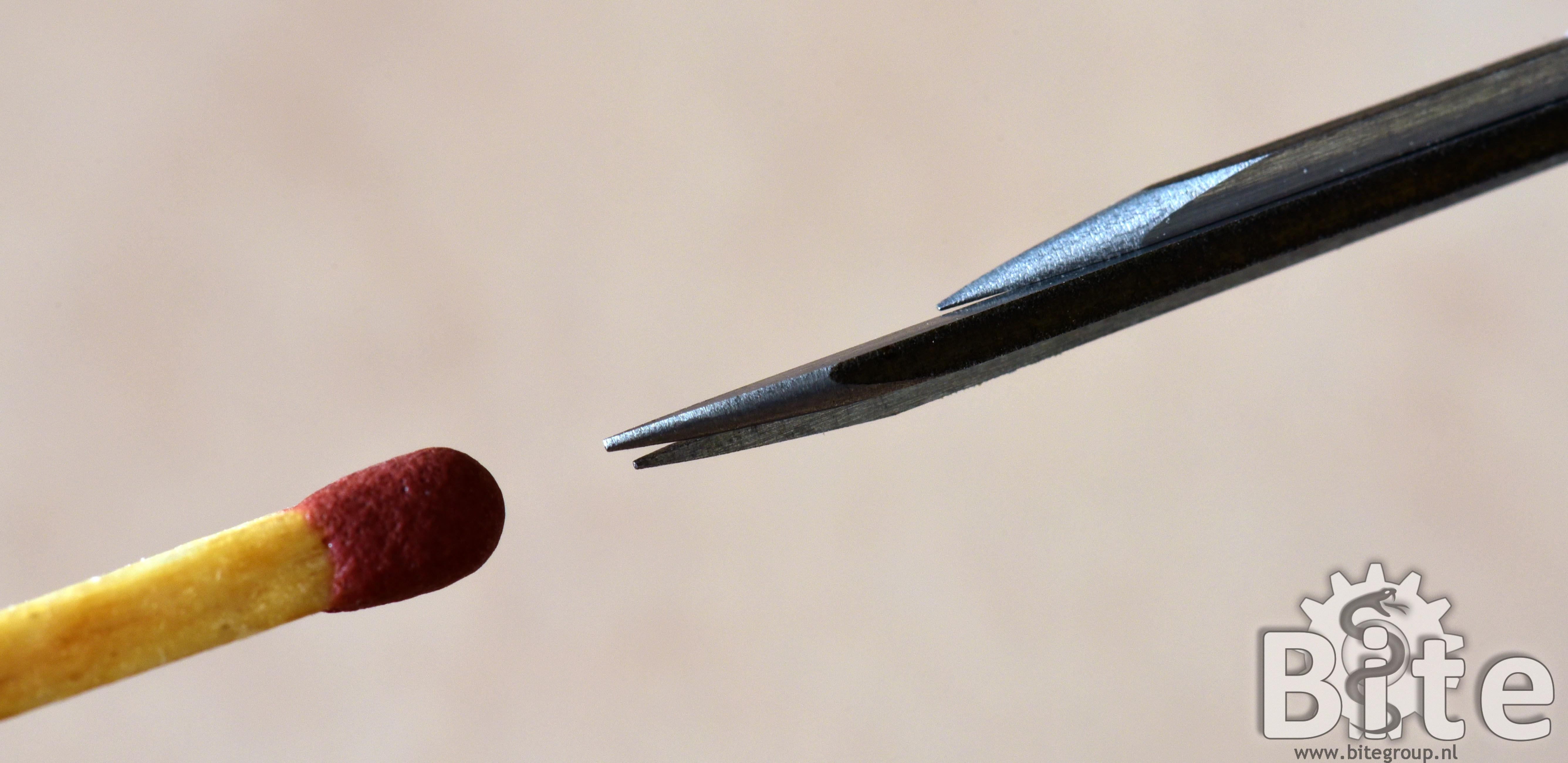
Inspired by the anatomy of wasp ovipositors, we developed an Ovipositor Needle containing a 2 mm thick “needle” composed out of four sharp and polished stainless steel rods, representing four ovipositor valves. The four valves can be individually moved forward and backward by means of electromechanical actuators mounted in a propulsion unit that is standing on four passive wheels. If the needle is inserted into a gel that represents tissue, and if the four valves are sequentially moved forward and backward, the friction behaviour around the valves in the gel will result in a net pulling motion that drives the needle forward through the gel. The ovipositor needle is therefore self-propelling, meaning that it does not need a net pushing motion for moving forward through tissue like normal needles do.
Ovipositor Needle I is part of the WASP project that focuses on the development of steerable needles for localized therapeutic drug delivery or tissue sample removal (biopsy). In a new prototype that is currently under development, we aim to extend the self-propelled needle with steering capabilities at an outer diameter of just 1 mm.
In nature, several species of parasitoid wasps have a thin and flexible needle-like structure, called ovipositor, which is used to deposit eggs in a host (e.g., a larva) hidden into tree trunks or fruits. The wasp ovipositor consists of three segments, called valves, longitudinally connected that can slide along each other. The animals can drill in different substrates by actuating the valves in a reciprocal motion and steer by changing the relative positions of the valves during probing (i.e. protracting and retracting of the valves).
We are currently developing a novel steerable needle for minimally invasive interventions inspired by the wasp-ovipositor. However, the steering mechanisms used by the animal is not yet fully understood.
The project will focus on understanding how the steering mechanism works and which characteristics of the ovipositor play a relevant role.
The student will use detailed 3D images of different ovipositors to design several replicas of the wasp ovipositor in larger scale with 3D printed techniques. The prototypes will be tested with an experimental facility where motion pattern and speed can be controlled. The ovipositors will be inserted in gelatine of different concentration to study the design parameters effecting the steering mechanism.
Comfort and functionality of upper limb prosthetics is highly dependent on socket performance. Correct anatomical fit is therefore of paramount importance for prosthetic designs. We believe that the complex design process of prosthetic sockets can be achieved automatically using accurate anatomical models of the stump. With the increasing advance in smartphone technology it is possible to reconstruct digital models based on camera information. We plan to explore current technologies for generating 3D digital models from multiple 2D photos and assess such techniques to stablish a framework in which smartphone technology can be used to generate 3D computer models of upper limb stumps. Using precise geometry of the stump and current CAD technologies it is possible to create a socket design that fits accurately into the residual limb. We plan to adopt such process to build fully working prosthetic sockets using 3d printing technology for developing countries.
Contact: Juan Cuellar, J.S.CuellarLopez@tudelft.nl
During colonoscopy procedures an endoscopic device is inserted into the patient and pushed through the colon with consequential discomfort to the patient. Self-propelling devices that are able of moving through a lumen without the need of external push could be beneficial for these applications. Research in this topic is ongoing, but no successful solutions have yet been discovered.
At TU Delft a former master student (Perry Posthoorn) developed a self-propelled device inspired by the mechanism of the ovipositor of the wasp. The ovipositor is a needle-like structure which consists of three elements that can slide along each other. By means of a reciprocal movement of the elements the wasp is able to insert the ovipositor through a substrate. The reciprocal sliding mechanism of multiple elements has inspired the design of our ovipositor-device.
Preliminary tests have shown that the device is able to move through an ex-vivo porcine colon, although at extremely slow speed due to a sub-optimal internal construction of the device.
The aim of this graduation project is to develop a strongly improved endoluminal device aiming at maximizing propulsion speed at minimal internal complexity with the final aim to make a revolutionary new system suited for disposable use.
For more information contact Marta Scali (m.scali@tudelft.nl).
Developed in 2013-2014, diameter 5 mm, steering range: ±150º in all directions.
Nature exhibits two inherently different approaches for creating maneuverable structures: the endo- or exoskeleton approach, and the hydrostatic skeleton approach. An endo- or exoskeleton is a rigid structure connected by joints that enable motion, for example in our own body. A hydrostatic skeleton, however, is a compliant structure solely contructed out of soft tissues, for example in the tentacle of a squid or in the trunk of an elephant.
Conventional steerable designs, based on rigid links and hinged mechanisms, are best comparable with nature’s endo- or exoskeleton approach. These conventional designs have proven to be highly effective at large dimensions, as for example in the scales of an excavator. At the smaller dimensions needed for minimally invasive surgery, however, the fabrication of such hinged structures becomes increasingly difficult.
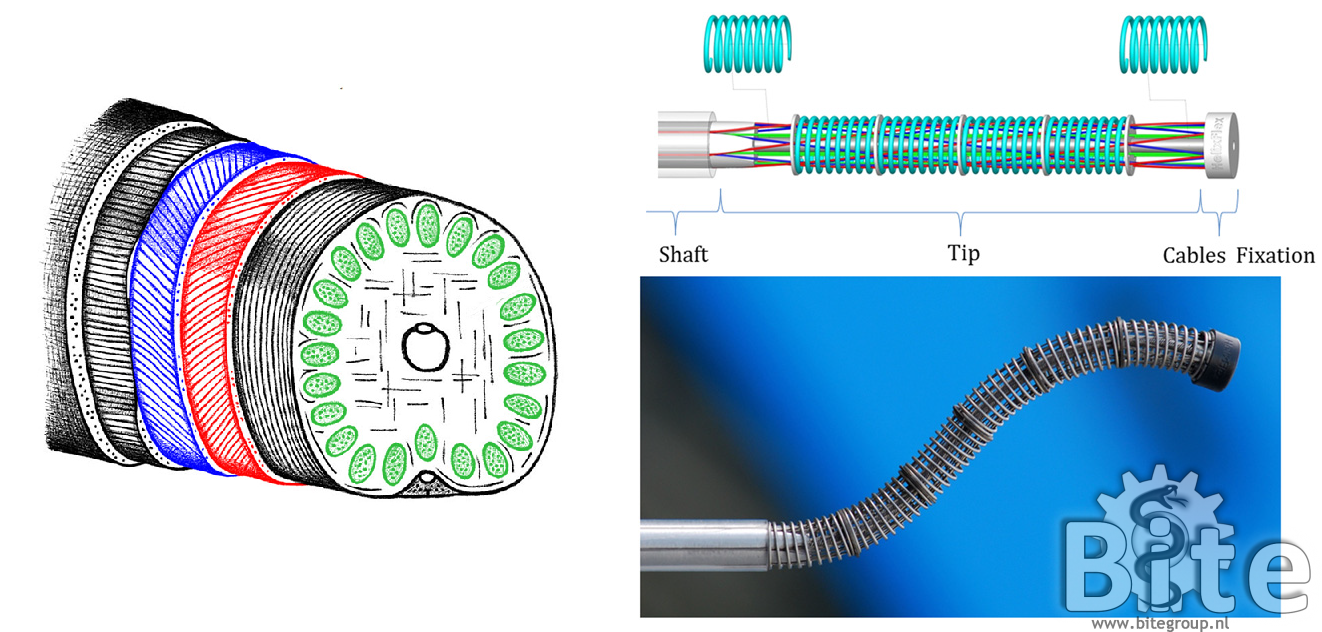
The muscular hydrostatic skeleton in the arms of Loliginid squid consists out of differently orientated muscle layers (see Figure). Simultaneous contraction of these muscle layers results in a flexible, fluent motion. This led to the development of a new principle of steering via simultaneous actuation of multiple, differently orientated cable layers.
Inspired by nature’s hydrostatic skeleton approach, the multi-maneuvrable tip of the HelixFlex consists of a single compliant segment, and incorporates three different cable layers: one with parallel cables and two with helically-oriented cables. Simultanuous actuation of these cable layers is accomplished via a similarly shaped joystick in the handle of the instrument. By manually controlling this joystick, the user can control the movement of HelixFlex’ tip in four Degrees of Freedom, resulting in a fluent motion that greatly reflects the motion of squid tentacles (see movie).
To our knowledge, the HelixFlex is the first instrument that uses simultaneous actuation of parallel- and helical-routed cable layers, and therefore a patent is pending.
Left: A section view of the Loliginidae squid tentacle showing the differently orientated muscle layers. Right: the steerable tip of HelixFlex containing multiple differently orientated cable layers. [1]