Sharks are extremely diverse group of vertebrates and inhabit a wide variety of aquatic habitats. The skin of sharks is covered in thousands of tooth-like denticles or scales that are anchored to the collagenous layer of the skin known as the stratum laxum. These scales play an important role in locomotion in terms of drag reduction and lift production. Despite numerous studies on the functional significance of shark denticles , no studies have been performed to investigate the effect of the anchoring of the denticles in the skin or the effect of denticle shape change on the drag reducing and lifting abilities. Moreover, no studies to date have been conducted to study the effect of the denticles stacking and overlapping on the denticles performance.
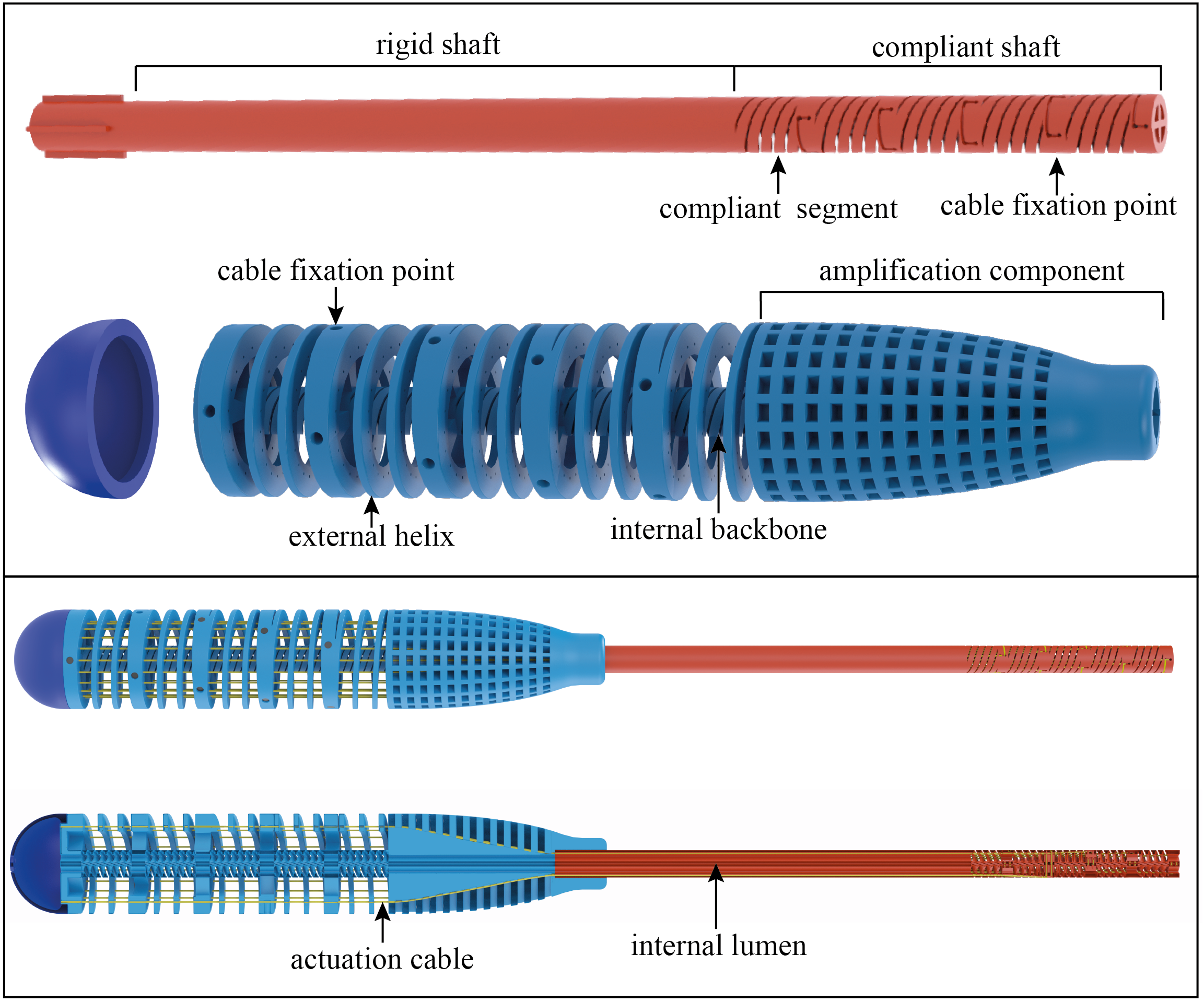
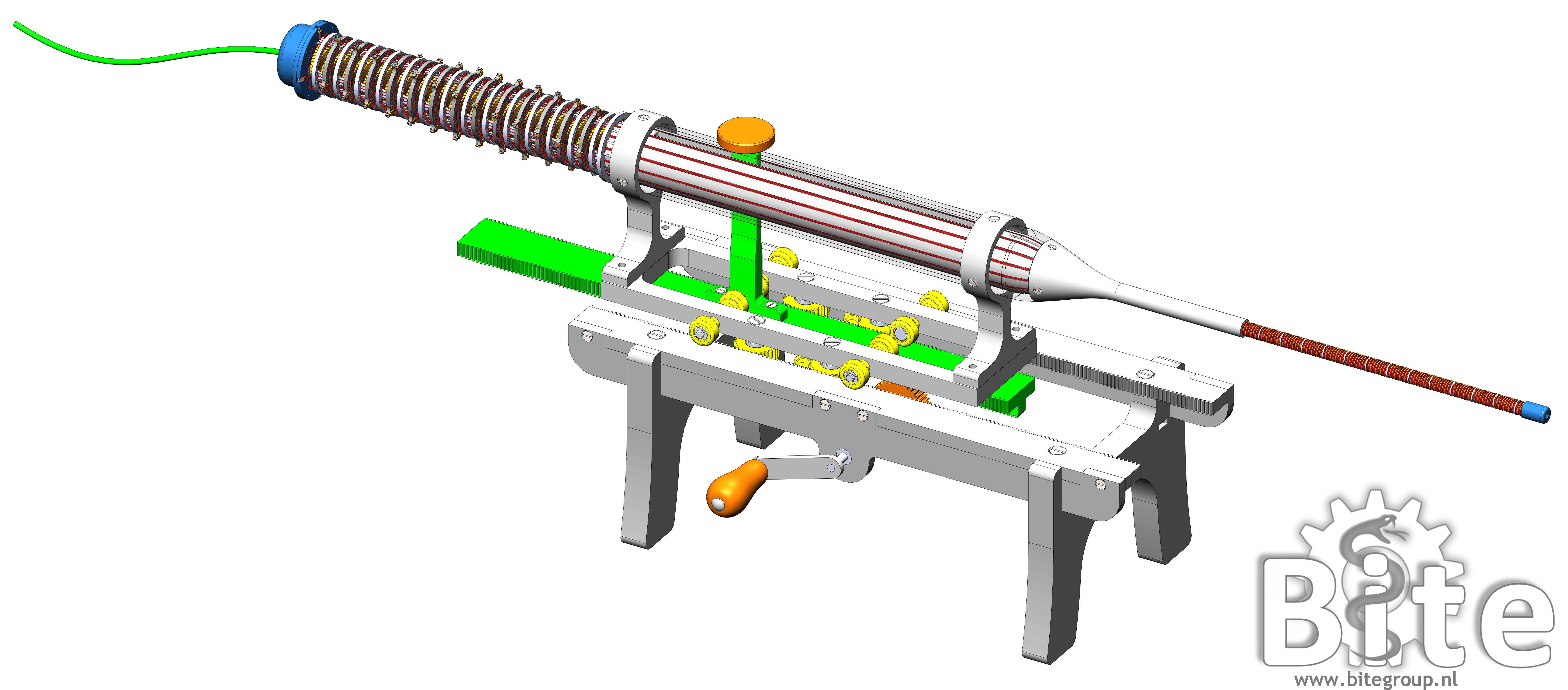
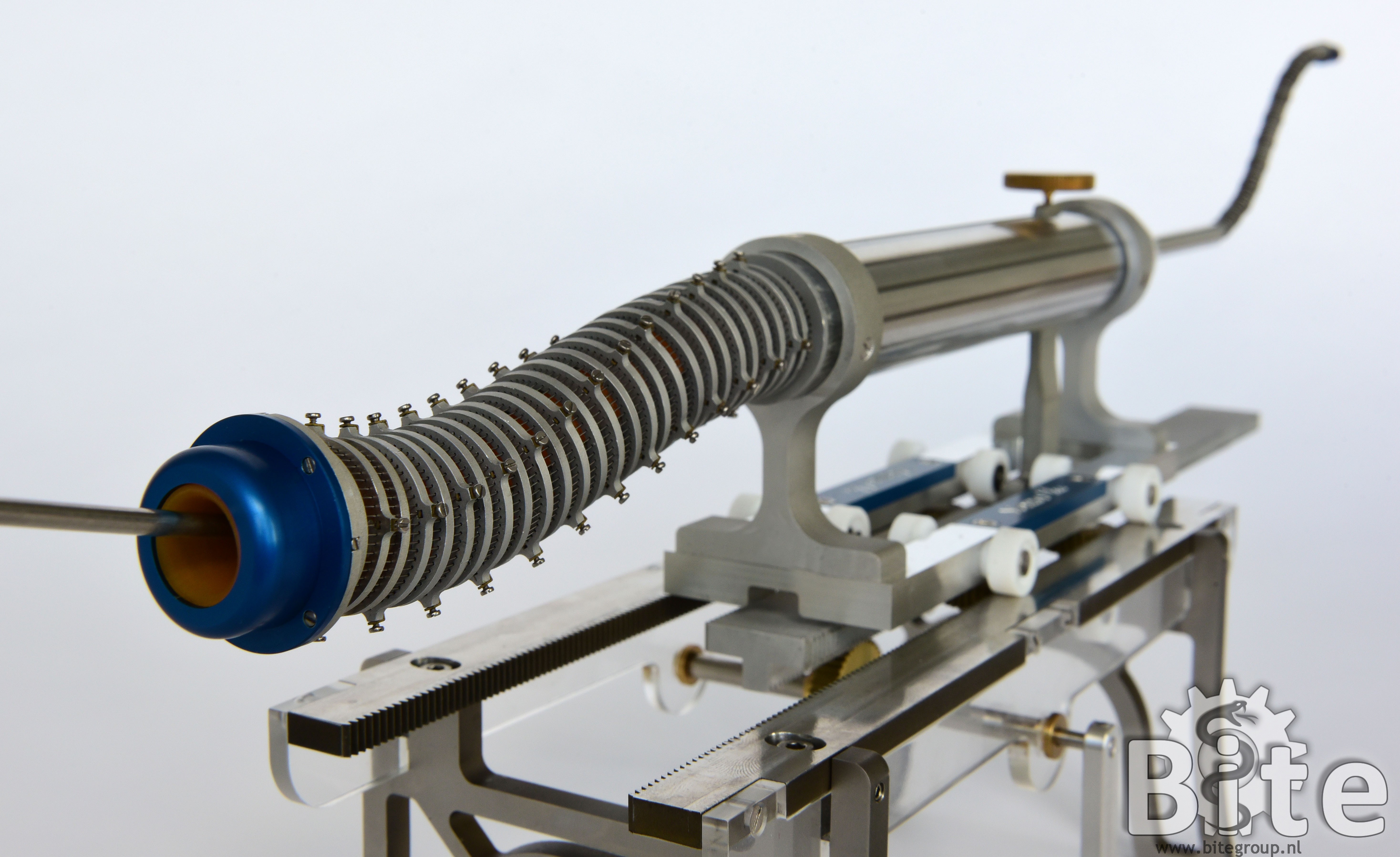
The objective of this project is to take the first steps in understanding the effect of shark denticle morphology(roughness, waviness, texture), stacking, and anchoring on the drag reducing and lift increasing properties of the shark skin using computational models and real-life biomimetic shark skin prototypes.
A compatible literature study is available for this project which is “Review of denticles in sea animals”. The objective of this study is to make an overview of the existing denticles in sea animals, the differences in their design and their influence on the drag reduction for these sea animals.
Interested? Contact Aimée Sakes: A.Sakes@tudelft.nl or Jovana Jovanova: J.Jovanova@tudelft.nl or Mostafa Atalla: M.A.A.Atalla@tudelft.nl