

Developed in 2010-2011, thickness 15 mm, steering range: ±90º in all directions, made entirely by 3D-printing.
Despite its success, e.g. in prostatectomy, da Vinci’s steerable grasper EndoWrist from Intuitive Surgical has a complex design prone to steel cable fatigue, potential sterilization issues and high associated costs, all of which insinuate a need for an alternative. The aim of our DragonFlex project is to demonstrate a design of a structurally simple handheld steerable laparoscopic grasping forceps free from cable fatigue, while attaining sufficient bending stiffness for surgery and improving on EndoWrist’s maneuverability and dimensions.
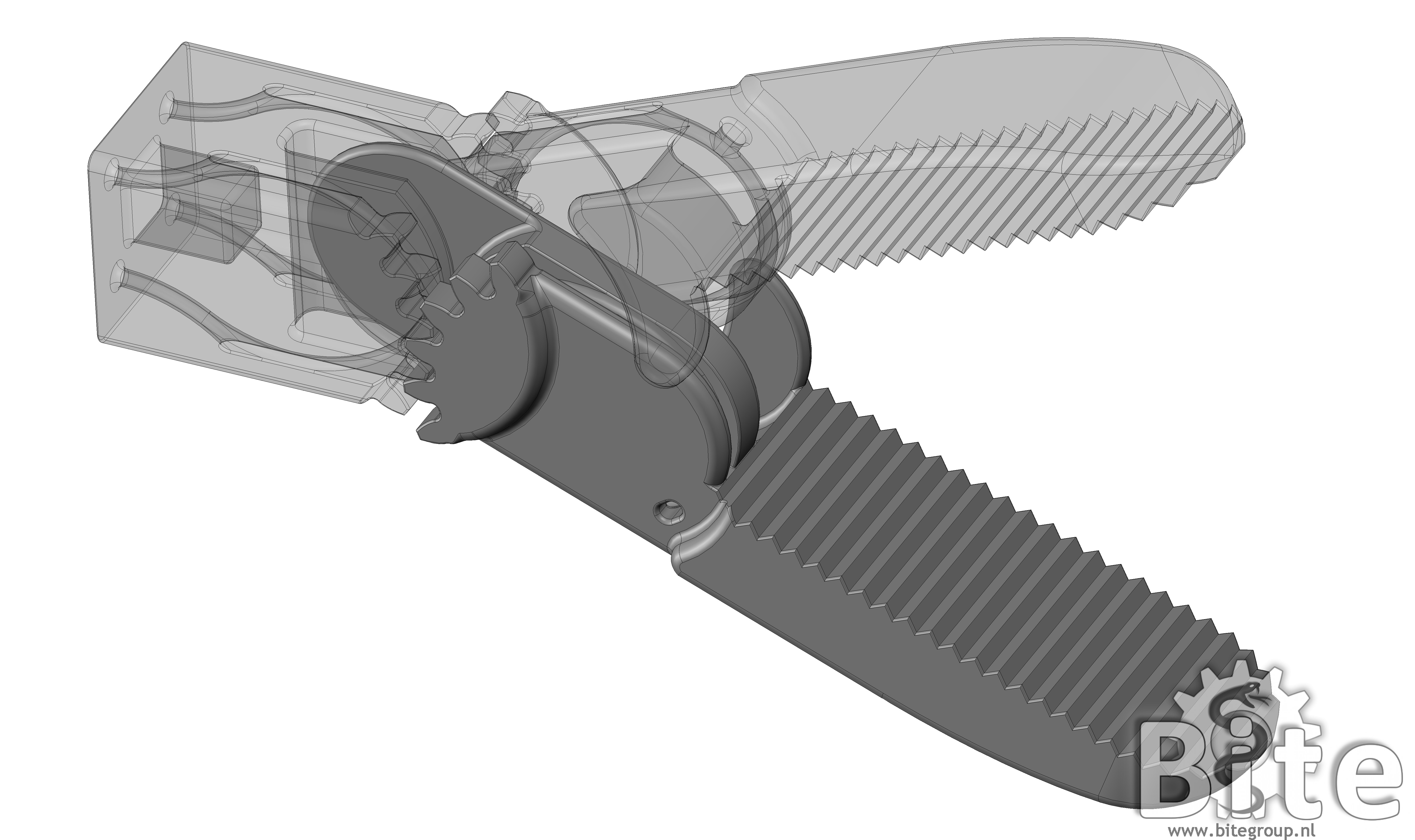
Having equal joint functionality to EndoWrist, DragonFlex’s instrument tip contains only four parts, driven and bound by two cables mechanically fixed in the handle. Two orthogonal planar joints feature an innovative rolling link mechanism allowing the cables to follow circular arc profiles of a diameter 1.5 times larger than the width of the instrument shaft. Besides maximizing the cable lifespan, the rolling link was designed to equalize the force requirements on both cables throughout joint rotation, making the handling fluid and effortless. The smart stacked joint design enables control of seven Degrees of Freedom (DOF) by only two cables and seven instrument components in tip, shaft and handgrip altogether.
The DragonFlex prototype was developed by means of 3D-printing, allowing grasping and omnidirectional steering over ±90°, exhibiting promisingly high bending stiffness and featuring extreme simplicity. DragonFlex concept sheds new light on the possibilities of additive manufacturing of surgical instruments, allowing for a feature-packed design, simple assembly, suitability for disposable use and potential MRI compatibility.


Publications
- Jelinek F., Breedveld P. (2015). Design for additive manufacture of fine medical instrumentation: DragonFlex case study. ASME Journal of Mechanical Design, Vol. 137, No. 11, pp. 111416-1–7.
- Jelinek F., Arkenbout E.A., Henselmans P.W.J., Pessers R., Breedveld P. (2015). Classification of Joints Used in Steerable Instruments for Minimally Invasive Surgery. ASME Journal of Medical Devices, Vol. 9, March 2015, pp. 010801-1-010801-11.
- Jelinek F., Diepens T., Dobbenga S., Jagt G. van der, Kreeft D., Smid A., Pessers R., Breedveld P. (2014). Method for minimizing rolling joint play in the steerable laparoscopic instrument prototype DragonFlex. Minimally Invasive Therapy, 2014, Early Online, 1-8.
- Jelinek F., Gerboni G., Henselmans P.W.J., Pessers R., Breedveld P. (2014). Attaining high bending stiffness by full articulation in steerable minimally invasive surgical instruments. Minimally Invasive Therapy, 2014, Early Online, 1-9.
- Jelinek F., Pessers R., Breedveld P. (2014). DragonFlex Smart Steerable Laparoscopic Instrument. ASME Journal of Medical Devices, Vol. 8, March 2014, pp. 015001-1-015001-9.
- Jelinek F., Arkenbout E.A., Henselmans P.W.J., Pessers R., Breedveld P. (2014). Classification of Joints Used in Steerable Instruments for Minimally Invasive Surgery. ASME Journal of Medical Devices, Vol. 8, Sept. 2014, pp. 030914-1-030914-2
- Jelinek F., Breedveld P. (2013). DragonFlex – Smart steerable laparoscopic instrument. ASME Journal of Medical Devices, Vol. 7, June 2013, pp. 020911-1-020911-2 (also published in Proc. 2013 ASME Design of Medical Devices Conference, April 8-11, Minneapolis, MN, USA).
- Jelinek F., Dobbenga S., Jagt G. van de, Kreeft D., Smid A., Pessers R., Breedveld P. (2013). The method for minimizing the rolling joint play in the steerable laparoscopic instrument prototype – DragonFlex. Proc. ASME Design of Medical Devices Conference – Europe Edition 2013, Oct. 7-9, Aula Conference Centre, TU Delft, Delft, the Netherlands, 1 p.
- Jelinek F., Dobbenga S., Jagt G. van de, Kreeft D., Smid A., Pessers R., Breedveld P. (2013). The method for minimizing the rolling joint play in the steerable laparoscopic instrument prototype – DragonFlex. Proc. 25th International Conference of Society for Medical innovation and Technology (SMIT), Sept. 5-7, Baden-Baden, Germany, 1 p.
- Jelinek F., Pessers R., Breedveld P. (2013). DragonFlex – smart and simple steerable laparoscopic instrument. Abstr. 4rd Dutch Bio-Medical Engineering Conference, Jan. 24-25, Egmond aan Zee, the Netherlands, 1 p.