

Developed in 2016-2017, 13 cm wide, 20 cm long, and 10 cm high.
During complex surgical procedures such as in skull-base surgery, there is a need to reach difficult-to-reach locations via narrow anatomic corridors. Performing surgery along complex 3D pathways requires a snake-like instrument able that memorizes the 3D shape of the followed pathway and shifts the shape backward as the instrument moves forward. This snake-like method of locomotion is called “follow-the-leader locomotion”, in which the head is the “leader” and the body follows the pathway of the head, see the following animations:
Follow-the-leader locomotion requires a segmented multi-steerable instrument as well as a memory in which the angles of the segments can be stored and shifted. In robotic approaches, the actuation usually occurs locally, within the segments, by miniature electric motors controlled by a computer. This will, however, result in a device much too large for surgical applications. Alternatively, the actuators can be stored in a handle so that larger motors can be used in combination with steering cables that transfer the motion to the snake-like tip. Although feasible, using electric actuators controlled by a computer will result in a complex and expensive system requiring additional safety measures to ensure reliability during surgery.
In a desire to create a relatively low-cost follow-the-leader system that combines high safety with small dimensions, we explored an alternative follow-the-leader approach by using a mechanical memory inspired by the technology of mechanical calculators such as Charles Babbage’s Difference Engine.
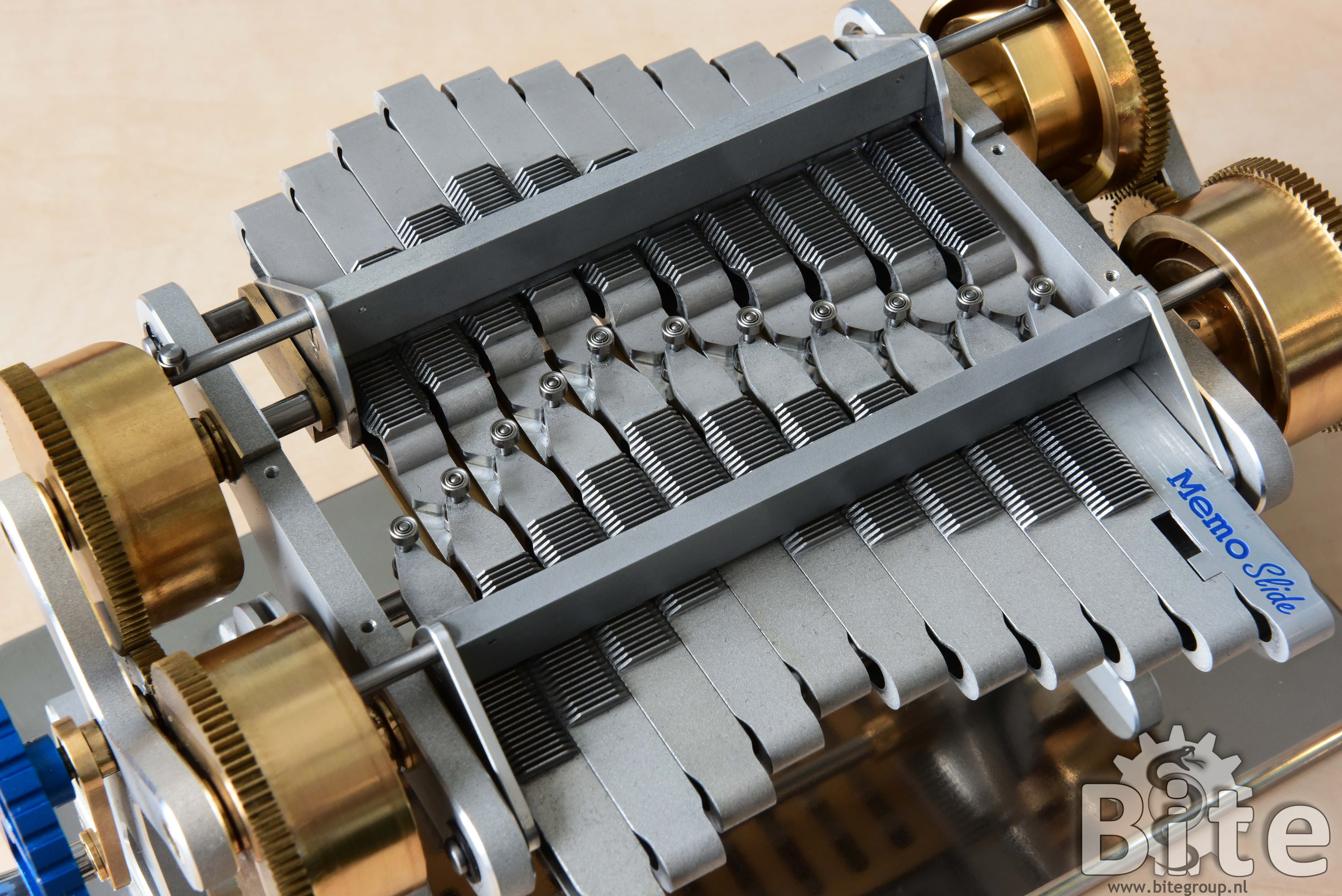
MemoSlide features two mechanical memory registers: a static register (green in the design drawing below) and a moveable register (red) in which the angles of 11 tip segments can be stored, the angles represented by 11 small Ø3 mm ball-bearings that can slide sideways through slots in the brass top plate . The two registers are mutually coupled via a system of ball-bearings and cams underneath the brass top plate. Both registers can be locked and unlocked, and the moveable register can be shifted one segment forward or backward relative to the static register. The position of the first tip segment can be controlled by turning the blue steering wheel. Turning the crank around the steering wheel then results in a sequence of locking, unlocking and shifting motions, controlled by the four brass cams at the corners of the device, to memorize and shift the position of the ball bearings backward along the registers. The movie below shows an example in which MemoSlide is programmed with a sinusoidal shape that is shifted backward along the device (and then forward again, as the device works in two directions).
Although in principle suited for controlling the shape of a snake-like surgical device, MemoSlide is in its current configuration still too complex and limited to 2D pathways. Based on our experience with MemoSlide, we are currently developing a new mechanical system suited for memorizing 3D shapes and sufficiently simple for integration in the handle of a snake-like surgical device. We will keep you posted!


Publications
- Henselmans P.W.J. (2020). Mechanical Snakes – Path Following Instruments for Minimally Invasive Surgery. PhD-thesis, TU Delft, ISBN 978-94-6402-213-1, 177 p.
- Henselmans P.W.J., Gottenbos S., Smit G., Breedveld P. (2017). The MemoSlide: an explorative study into a novel mechanical follow-the-leader mechanism. Proc. of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine. Vol. 23, No. 12, pp. 1213-1223.
Media