

Developed in 2019-2020, diameter Ø8 mm
In minimally invasive surgery, instrument maneuverability is limited by the use of small incisions. Increasing the number of degrees of freedom (DOF) of the instrument shaft is beneficial for many surgical interventions. However, increasing DOF usually leads to high mechanical complexity, issues with sterilisation and too large cost price for disposable use.
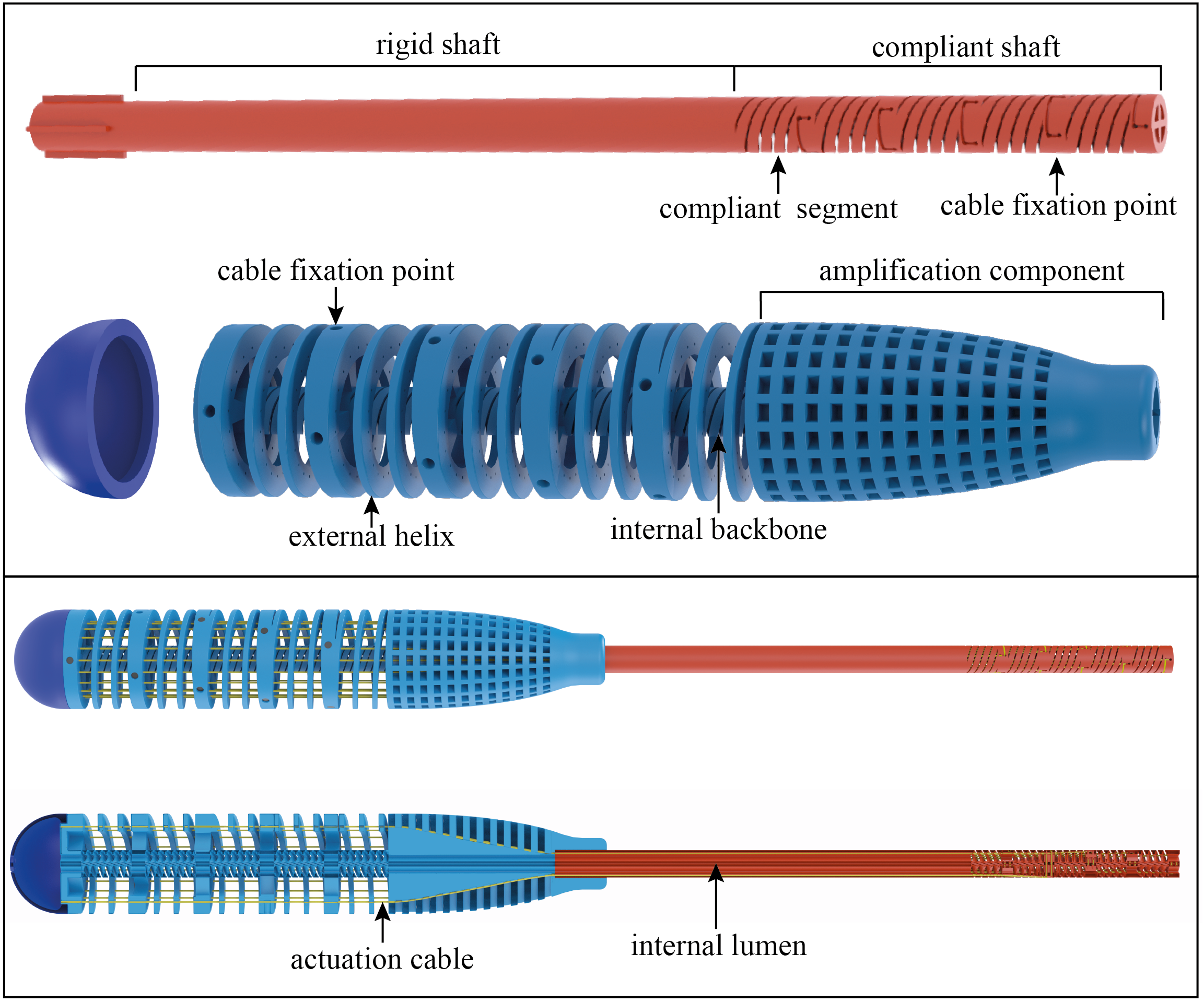
In an attempt to reduce manufacturing time we propose the first fully 3D-printed handheld, multi-steerable instrument: the HelicoFlex. The instrument is mechanically actuated and is fitted with a compliant shaft containing five serially-controlled segments enabling high maneuverability in 10 degrees of freedom.
Our new, compliant segment design merges the functions of four helicoids and a continuum backbone combining high torsion and axial stiffness with low bending stiffness. Five such compliant segments were combined to form the shaft of the HelicoFlex. Following the control design strategy of our older MultiFlex and HelixFlex devices, a compliant control handle was designed that mimics the shaft structure.
The entire frame of the HelicoFlex consists of only three complex-shaped 3D printed components that are printed without a need for any support material in the compliant section. The use of minimal-assembly 3D printing drastically decreases assembly time. Our 3D printed shaft features four working channels that facilitate combined use with flexible instruments such as biopsy forcipes. With its 10 degrees of freedom, our HelicoFlex showed a fluid motion in performing single and multi-curved paths.


Publications
- Henselmans P.W.J. (2020). Mechanical Snakes – Path Following Instruments for Minimally Invasive Surgery. PhD-thesis, TU Delft, ISBN 978-94-6402-213-1, 177 p.
- Culmone, C., Henselmans, P. W., van Starkenburg, R. I., & Breedveld, P. (2020). Exploring non-assembly 3D printing for novel compliant surgical devices. Plos one, 15(5), e0232952.
- Culmone, C., Smit, G., & Breedveld, P. (2019). Additive manufacturing of medical instruments: A state-of-the-art review. Additive Manufacturing, 27, 461-473.