

In ductoscopy, the milk ducts of the breast are investigated using a so-called ductoscope. The ductoscope consists of a handle with three canals: (1) for insertion of the micro-endoscope, (2) for insertion of a tool, and (3) the irrigation canal to expand the milk duct, and a hollow tube that is inserted in the milk duct.
In case a lesion is found during this procedure, a biopsy procedure is performed using a biopsy basket. Unfortunately, this procedure is very unreliable and difficult to perform, often resulting in the need for a follow-up procedure.
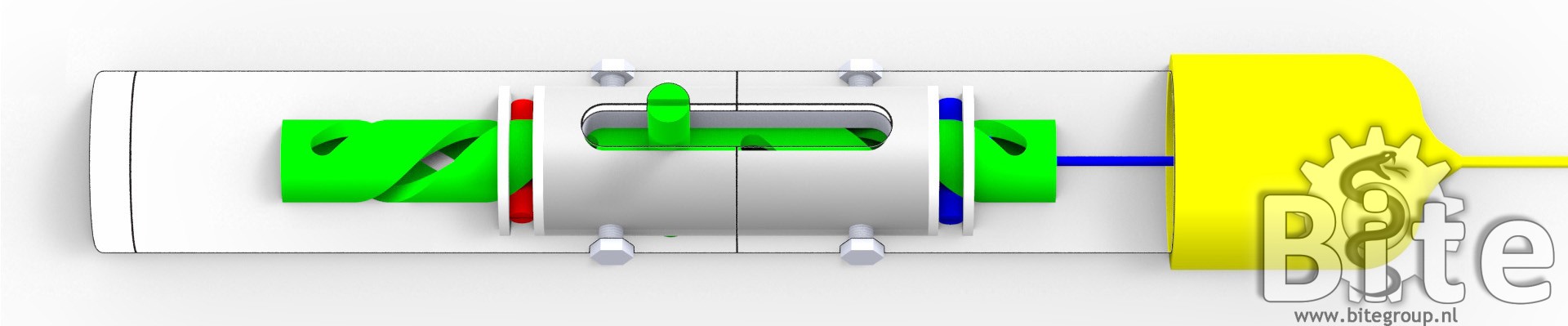
In an effort to overcome this challenge, we have developed a biopsy needle that can be used during the ductoscopy procedure. The biopsy needle consists of two concentric cutting blades with a rectangular cut-out at the distal tip. By counter-rotating the cutting blades, a biopsy can be obtained, similar to the way a scissor works. The cutting blades are actuated using a handle in which the counter-rotating motion of the blades is transferred to an axial translation (see below).
In a proof-of-principle experiment, a milk duct phantom was manufactured out of gelatin. The biopsy needle was able to reliably obtain biopsy samples from this phantom. Furthermore, the biopsy needle was also successfully combined with the ductoscope.



Publications
- Sakes A., Snaar K., Smit G., Witkamp A.J., and Breedveld P. (2018). Design of a Novel Miniature Breast Biopsy Needle for Ductoscopy. Biomedical Physics & Engineering Express. Accepted.









